Řídicí jednotky
Některé řídicí jednotky jsou vybaveny i dalšími senzory, například magnetometrem (elektronický kompas), barometrem pro měření výšky, nebo umožňují připojit GPS modul pro navigační funkce. Pro typické FPV létání však postačuje základní IMU – tedy gyroskop s akcelerometrem.
Firmware je software, který běží přímo na mikroprocesoru řídicí jednotky a určuje, jak se bude dron chovat. Zajišťuje zpracování dat ze senzorů, komunikaci s přijímačem, regulátory i kamerovým systémem a zároveň určuje, jak reaguje na pokyny pilota. V oblasti FPV dronů se používá několik hlavních druhů firmwaru – nejrozšířenějšími jsou Betaflight, INAV a ArduPilot, které popíšeme dále. Betaflight funguje obvykle na každé řídicí jednotce pro FPV drony. ArduPilot a INAV fungují jen na některých typech mikroprocesorů.
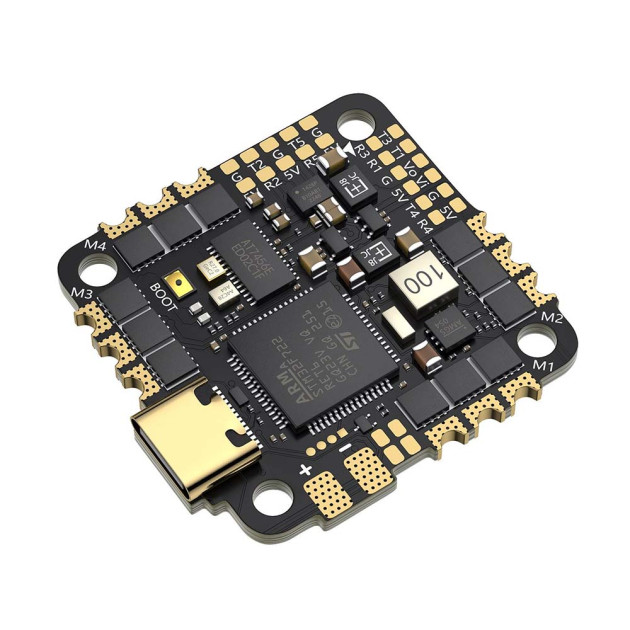
Mikroprocesor určuje výpočetní výkon řídicí jednotky, počet a typ rozhraní pro připojení periferií a celkovou rychlost odezvy systému. V současné době se nejčastěji používají procesory řady STM32 od společnosti STMicroelectronics, které jsou optimalizované pro řízení v reálném čase a mají širokou podporu ve firmwaru jako Betaflight, INAV nebo ArduPilot. Na základních, často AIO jednotkách, je mikroprocesor STM32F411. Má však omezený výkon a dostupné jen 2 UARTy. Velmi rozšířený je STM32F405 s dostatečným výkonem pro většinu FPV aplikací. Výhodou je dobrá kompatibilita a podpora FW ArduPilot, nevýhodou menší výpočetní rezerva. STM32F722 patří mezi výkonnější modely, které nabízejí rychlejší taktovací frekvenci a více hardwarových rozhraní. Pro menší paměť F722 není podporovaný ArduPilotem. STM32H743 je moderní procesor vyšší třídy s frekvencí až 480 MHz, ideální pro náročné aplikace, GPS navigaci a pokročilou telemetrii. Jeho výhodou je vysoký výkon a rychlé zpracování dat. Desky mají často dvě IMU jednotky pro lepší spolehlivost. H743 je podporovaný všemi firmwary. STM32G4 představuje novější generaci procesorů s optimalizací pro řízení motorů. Často je na AIO deskách, které obsahují i regulátory (ESC). AT32 je alternativní řada procesorů od společnosti Artery Technology, která se v poslední době objevuje u levnějších desek a nabízí velmi dobrý poměr cena/výkon.
IMU jednotka (Inertial Measurement Unit) je klíčovou součástí každé řídicí jednotky. Gyroskop poskytuje údaje o úhlové rychlosti a akcelerometr o zrychlení. Tyto informace firmware využívá pro stabilizaci letu a kompenzaci náklonů. Kvalita a typ IMU senzoru mají zásadní vliv na citlivost řízení, odolnost vůči vibracím a celkovou letovou stabilitu. Mezi nejpoužívanější senzory na FPV dronech patří především MPU6000, ICM42688 a BMI270. MPU6000 je dlouhodobě považován za nejspolehlivější IMU čip. Vyniká vysokou odolností vůči šumu a vibracím, což z něj dělá ideální volbu pro freestyle a závodní drony. Jeho hlavní výhodou je stabilní provoz i při výrazných otřesech, nevýhodou pak vyšší cena a horší dostupnost. ICM42688 patří k modernější generaci senzorů s vyšší přesností a rychlejší odezvou. Nabízí jemné měření a rychlou obnovovací frekvenci, což je výhodné u pokročilých řídicích jednotek s výkonnými procesory. Jeho slabinou je však větší citlivost na rušení a vibrace, proto vyžaduje kvalitní softwarové filtry a dobře odladěnou konstrukci dronu. Jedná se o nejpoužívanější IMU jednotku pro FPV drony. BMI270 jsou senzory od firmy Bosch. BMI270 má nižší vzorkovací frekvenci, která může snížit odezvu dronu, a používá se tak spíš na dronech pro plynulejší lety.
Ostatní komponenty dronu se k řídicí jednotce připojují přes rozhraní UART, I2C a CAN. UART (Universal Asynchronous Receiver-Transmitter) je nejběžnější rozhraní v FPV dronech – používá se pro připojení přijímače, video vysílače (VTX), GPS, telemetrie nebo blackboxu. I2C je sběrnice určená pro senzory s nižší datovou propustností, například magnetometr nebo barometr. CAN je moderní rozhraní s vysokou odolností vůči rušení, které se využívá u pokročilých systémů – například pro digitální ESC, GPS moduly, senzory nebo telemetrická zařízení u dronů s ArduPilotem či INAVem. CAN podporují desky s H7 procesorem.
Užitečnou funkcí řídicí jednotky je tzv. blackbox – interní nebo externí paměť, která zaznamenává chování dronu během letu. Tyto záznamy se využívají pro ladění PID regulace, filtrů i pro hledání chyb v systému. Některé jednotky mají blackbox přímo v sobě, jiné umožňují zápis na SD kartu, a u levnějších modelů tato funkce chybí úplně.
Při výběru řídicí jednotky je důležité sledovat také způsob zapojení. Moderní desky mají často konektory pro připojení ESC, digitálních i analogových video přenosů, LED diod nebo dalších periferií, což výrazně usnadňuje stavbu a servis. Každý výrobce však může používat jiné pořadí pinů v konektorech, proto je třeba být při zapojování opatrný.
Řídicí jednotky se často kombinují s dalšími komponenty, aby se snížila hmotnost a zjednodušila stavba dronu. Některé desky mají integrovaný ELRS přijímač, Bluetooth/Wi-Fi modul pro bezdrátové nastavení, spínač napájení nebo přepínač kamer. AIO desky kombinují řídicí jednotku s regulátory v jednom. Ty menší AIO jednotky pro tinywhoopy často obsahují i video vysílač a stačí k nim tak připojit pouze kameru.
Velikost řídicích desek se určuje podle rozteče montážních děr a měla by odpovídat typu rámu, do kterého se deska instaluje. Největší formát s roztečí montážních děr 30,5×30,5 mm se používá u klasických 5″ a větších dronů, kde je dostatek prostoru pro standardní „stack“ s oddělenými komponenty (řídicí jednotka, ESC, VTX). Střední formát 20×20 mm je typický pro menší 3–4″ drony a závodní drony, kde je kladen důraz na nižší hmotnost, ale stále dostatek výkonu. AIO desky s roztečí 25,5×25,5 mm se používají hlavně u tinywhoopů, toothpicků a menších 2–3″ dronů. Při výběru je důležité ověřit, že rám podporuje odpovídající montážní rozteč a prostor pro konektory.

Firmware
Firmware je software řídicí jednotky, který pomocí pokročilých algoritmů zpracovává vaše pokyny z přijímače. Na základě toho a informací ze senzorů říká regulátorům, jak mají upravit otáčky motorů tak, aby chování koptéry odpovídalo vašim požadavkům z vysílačky. Nejpoužívanější firmware pro závodní koptéry je Betaflight. Pro létání s GPS stabilizací je vhodné použít INAV. Pro automatické lety misí, pokročilou stabilizaci a ovládání přes PC je ArduPilot.Betaflight

Betaflight je open-source firmware určený pro řízení FPV závodních, freestylových a micro dronů. Je navržen tak, aby poskytoval co nejrychlejší odezvu mezi pohybem páček vysílače a reakcí motorů. Díky optimalizovanému kódu a vysoké frekvenci řídicích smyček (až 8 kHz) dokáže Betaflight zajistit extrémně přesné a plynulé řízení i při vysokých otáčkách motorů.
Betaflight využívá PID regulaci, kterou lze detailně ladit pro dosažení požadovaného letového projevu. Součástí jsou také pokročilé digitální filtry, které eliminují vibrace a šum ze senzorů, čímž zvyšují stabilitu a efektivitu řízení. Firmware podporuje bidirectional DShot – protokol, který umožňuje obousměrnou komunikaci mezi řídicí jednotkou a regulátory, díky čemuž lze v reálném čase měřit otáčky motorů a automaticky optimalizovat filtraci.
Betaflight se používá především v manuálním (akrobatickém) letovém režimu, kdy pilot řídí úhlovou rychlost, nebo v režimu Angle, kdy řídí náklon dronu. Plyn je řízený manuálně. Při použití s GPS Betaflight umožňuje automatický návrat na místo startu (RTH), což přijde vhod především pro long-range lety.
V praxi je Betaflight vhodný pro všechny manuálně řízené drony (od malých whoopů až po 10″ long-range drony), u kterých je klíčová rychlost reakce, precizní kontrola a stabilita letu. Není však určen pro plně autonomní nebo waypointové mise, které spadají do kompetence systémů jako INAV nebo ArduPilot.
Betaflight se nastavuje pomocí PC aplikace Betaflight Configurator, kterému bude věnována samostatná kapitola.
INAV

INAV má základy stejné s Betaflightem a v některých věcech jsou si podobné. INAV se soustředí na stabilitu, přesnou navigaci a autonomní řízení. Je schopen pracovat s GPS, magnetometrem, barometrem a dalšími senzory, čímž umožňuje letové režimy jako Altitude Hold (udržení výšky), Position Hold (držení pozice) nebo Return to Home (RTH) – automatický návrat dronu na místo vzletu.
INAV využívá klasickou PID regulaci doplněnou o navigační řídicí smyčky, které vyhodnocují data z GPS a IMU. Díky tomu dokáže udržovat kurz, stabilizovat let i při větru a přesně reagovat na změny směru. Firmware podporuje funkce jako autonomní lety po trase (waypointy) i automatické přistání. Vše lze konfigurovat přes PC pomocí programu INAV Configurator, který umožňuje detailní nastavení senzorů, filtrů, mixů i letových režimů.
Na rozdíl od Betaflightu je INAV výrazně univerzálnější a používá se nejen u FPV dronů, ale také u letadel, kluzáků nebo VTOL konstrukcí. Je oblíbený zejména mezi piloty, kteří létají na dlouhé vzdálenosti nebo piloty FPV letadel.
ArduPilot
ArduPilot je nejpokročilejší open-source letový firmware pro drony, letadla, pozemní roboty i lodě. Oproti Betaflightu, který se zaměřuje na akrobatické řízení, a INAVu, jenž přidává základní navigační funkce, nabízí ArduPilot plnohodnotný autopilotní systém s rozsáhlou podporou senzorů, přesnou navigací a pokročilými automatizačními funkcemi. Umožňuje plně autonomní lety podle naplánovaných tras, řízení v reálném čase pomocí pozemní stanice (GCS software třeba na notebooku) a detailní správu všech letových režimů i bezpečnostních prvků. S velkými možnostmi je však spojené i poměrně komplikované nastavení, takže je ArduPilot vhodný až pro pokročilé stavitele dronů. K ArduPilotu lze snadno připojit externí onboard počítač (typu Raspberry Pi) pro rozšíření dalších funkcí.
Firmware podporuje některé řídicí jednotky pro FPV drony s F4 a H7 mikroprocesory. ArduPilot je také často používán na sofistikovanějších řídicích jednotkách pro profesionální použití. ArduPilot dokáže řídit prakticky cokoli. Nabízí mnoho režimů od manuálních (Acro, Stabilize) přes poloautomatické (AltHold, Loiter, PositionHold) až po plně autonomní (Auto s waypointy, Guided, RTL, AutoTune). Každý režim lze detailně konfigurovat. ArduPilot podporuje také pokročilé senzory, jako jsou GNSS přijímače s vícepásmovým GPS, přesné barometry, kompasy a další periférie připojené přes UART, I2C nebo CAN sběrnici.
Failsafe logika v ArduPilotu patří k nejpropracovanějším. Umožňuje definovat reakce při ztrátě RC signálu, nízkém napětí, ztrátě GPS nebo překročení hranic definované oblasti (geofence). Lze nastavit automatické přistání, návrat domů (RTL), přepnutí režimu nebo spuštění akce. ArduPilot zároveň detailně zaznamenává všechny parametry letu do interní paměti nebo na SD kartu, což umožňuje pokročilou analýzu vibrací, řízení motorů, spotřeby i chybových stavů.
ArduPilot disponuje dynamickými a harmonickými filtry pro potlačení vibrací velkých vrtulí. Lze použít od malých 2″ dronů až po 30″ a větší drony – všude tam, kde je stabilita a plynulost letu důležitější než extrémní agilita. Proces ladění lze urychlit funkcí AutoTune, která automaticky upravuje PID parametry podle chování dronu.
Konfigurace probíhá prostřednictvím programu Mission Planner (Windows) nebo QGroundControl (Windows/macOS/Linux/Android). Tyto aplikace umožňují kompletní nastavení, kalibraci, aktualizaci i plánování misí. Běžně jsou také využívané během letu pro kontrolu parametrů dronu.
ArduPilot je ideální volbou pro piloty, kteří chtějí spolehlivou navigaci, dlouhé lety, opakovatelné mise a maximální bezpečnost. Hodí se pro long-range platformy (7–10″, Li-ion/LiPo), velké průmyslové drony i letadla. Naopak pro čisté freestyle či závodní drony, kde je prioritou okamžitá odezva a jednoduchost, zůstává vhodnější Betaflight, zatímco INAV představuje kompromis mezi oběma přístupy.